库卡机器人 KRC 4 初次安装软件操作方法 :既可利用操作界面也可利用静默模式来进行安装。
Controller.ini
1 利用库卡机器人 操作界面: 模式和持久性不是至关重要的

2 不用库卡机器人 操作界面: 需注意模式和持久性(模式 =0 => 创建映射;模式 =1 =>恢复映射)

以下菜单项可用于结束 KR C 系统还原:
1 重启
使库卡机器人控制系统重新启动;如果 LED 熄灭,必须拔出库卡 U 盘,不然系统将受 U 盘导引而启动。
在静默模式状态下重启过程将自动执行,且库卡 U 盘无需拔出, 因为它会被自动关闭。
库卡机器人操作步骤 在该项操作方式里,需要使用一个外置监视器和显卡。
准备工作
1. 提前关闭另一台电脑里的静默模式 (版本 = 静默)2. 将 Image*C.wim 和 Image*D.wim 复制到 U 盘文件夹 《映射》里处置方式1. 库卡机器人控制系统关机
2. 插上具有起动功能且带有映射文件的库卡 U 盘,然后重启控制系统
3. 按序打开菜单: 开始 > 映射 > 恢复映射
创建映射如下图:

窗口 【 恢复 HDD】打开
选择映射如下图:
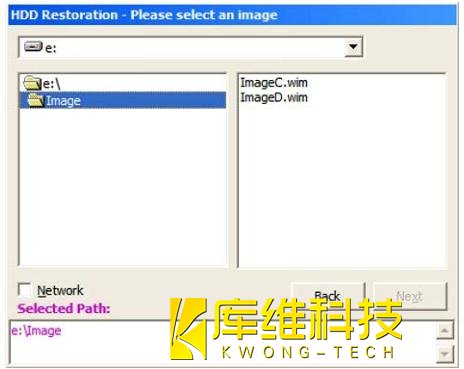
5. 为分区 C 选取存储器映射 C.WIM,或为分区 D 选取存储器映射 D.WIM 。总是建立两个分区。 点击 【 下一步】键继续。就此建立硬盘映射。
6. 按序打开菜单: 开始 > 系统 > 重启。
重启 / 关机如下图:
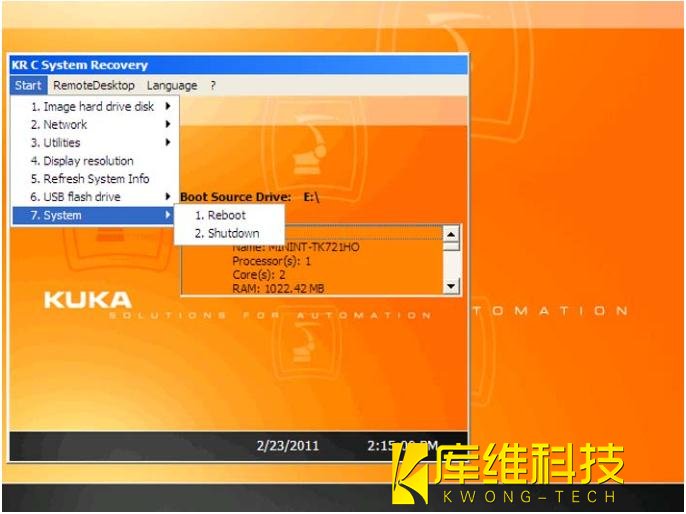
7. 库卡机器人
控制系统关机,拨出 U 盘,然后重启控制系统。
8. 插入附带工艺包的 U 盘。
9. 在主菜单选择: 投入使用 > 安装附加软件 。
10. 点击 【 新软件】软键。 如果 U 盘里的一个软件未能显示出来,则点击【 刷新】键。
11. 选中需安装的软件,然后点击 【 安装】键。 用 【 是】回答安全询问。 文件被复制到硬盘。
12. 如希望从该 U 盘装入另一工艺包,则重复执行第 12 步。
13. 重新开启控制系统。
14. 按序打开菜单: 文件 > 恢复 > 全部
需要时可传送或激活 WorkVisual 项目。
15. 点击 【 是】确认安全询问。 已存档的文件在机器人控制系统里重新恢复。
当恢复过程结束时,屏幕出现相关的讯息。
16. 如果已从 U 盘完成还原: 拔出 U 盘。
注意:如果正从 U 盘执行还原: 只有当 U 盘上的 LED 熄灭之后方可拔除 U 盘。 否则会导致 U 盘受损。
17. 重新开启机器人控制系统。
18. 切换到用户组 【专家】
20. 检查机器人序列号,填写机器人名称。