工业机器人KRC 4控制系统如何创建网络映射
发布日期:2022-08-13 10:15 浏览量:
前提条件
在机器人控制系统与网络已连接的条件下,硬盘映射可直接保存到一个网络驱动器里。
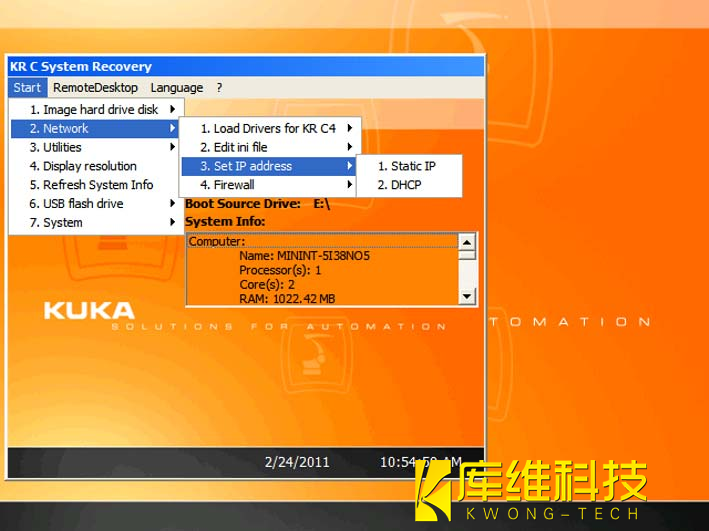
途径 设置 IP 地址
1 固定 IP 地址

2 借助 DHCP
用映射文件定义驱动器
3 驱动器已存在

如在 NetCon.ini 里定义了一个网络驱动器,那么它将被长期保存3 驱动器还可被定义为许可单次访问。
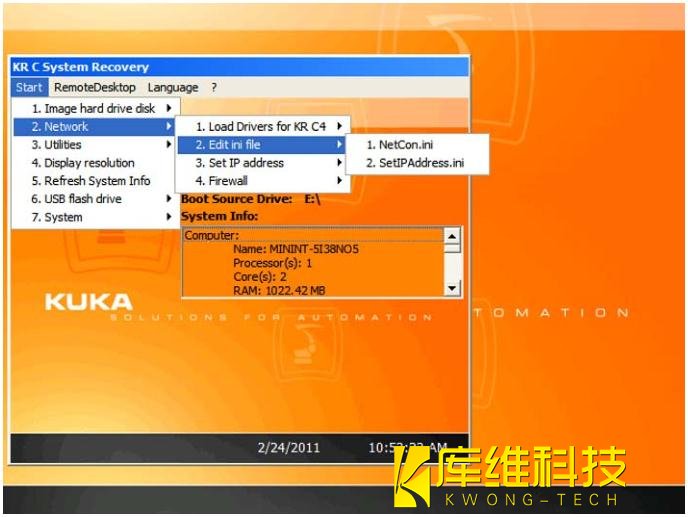
按序打开菜单: 开始 > 网络 > 编辑 ini 文件 > NetCon.ini 。
操作步骤:
1. 关闭工业机器人
控制系统静默模式 (版本 = 静默)
2. 插上具有起动功能的库卡 U 盘,然后重启工业机器人控制系统。
3. 按序打开菜单: 开始 > 网络 > 编辑 ini 文件。对文件 NetCon.ini 和 SetIPAddress.ini 进行编辑。
4. 按序打开菜单: 开始 > 网络 > 设置 IP 地址。选择使用固定 IP 地址还是 DHCP。
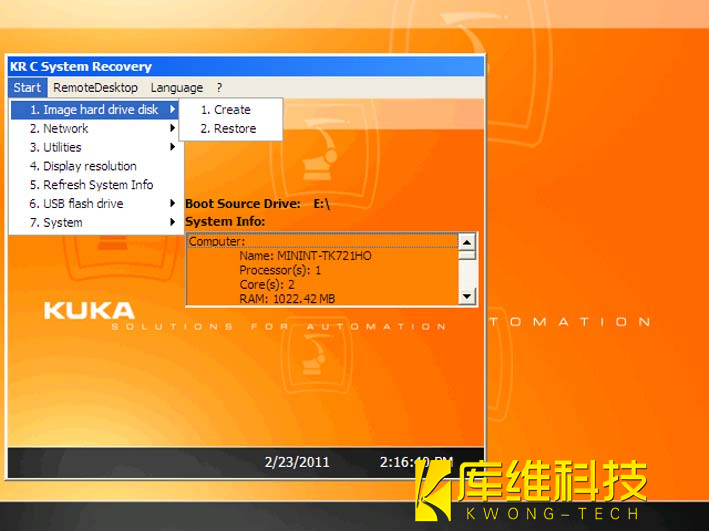
5. 按序打开菜单: 开始 >
映射 > 生成映射。
创建映射如下图:
6. 窗口 【 Continue on boot medium】打开。
选取 Bootstick如下图:
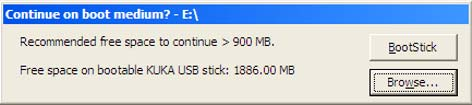
选择 【 启动 U 盘】键。
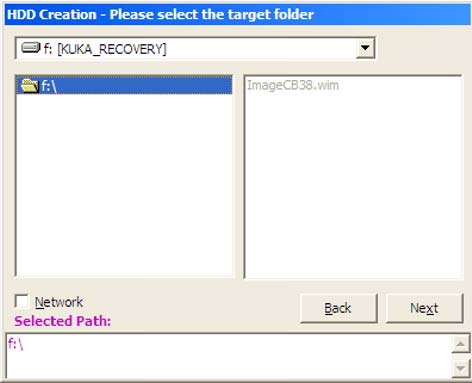
7. 窗口 【 HDD Creation】打开。
目录选择如下图:
8. 在 网络 设定所需的勾选栏。
9. 在窗口 【 登录网络】输入登录数据以链接网络驱动器:
登录网络如下图:
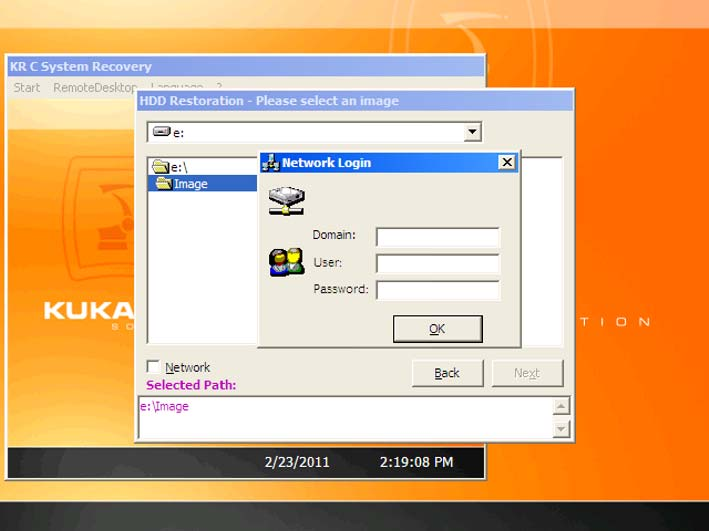
1 域名 (如存在)
2 用户名
3 密码
用 【 确定】键确认成功建立映射后,将出现一条确认讯息
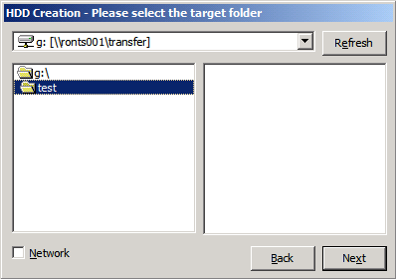
10. 选中网络驱动器,然后定位硬盘映射需保存的文件夹。 点击 【 下一步】键继续。
在网络驱动器生成 HDD如下图:
11. 输入硬盘映射名称,然后点击 【 确定】键确认。为分区 C 和分区 D 建立相互独立的存储器映射,然后保存到选定的文件夹。
12. 按序打开菜单: 开始 > 系统 > 重启。也可按序打开菜单: 开始 > 系统 > 关机,然后将 U 盘拔出。
相关文章