焊接机器人工装夹具设计需满足哪些要求?总结了这6点
发布日期:2019-09-19 09:43 浏览量:
说到
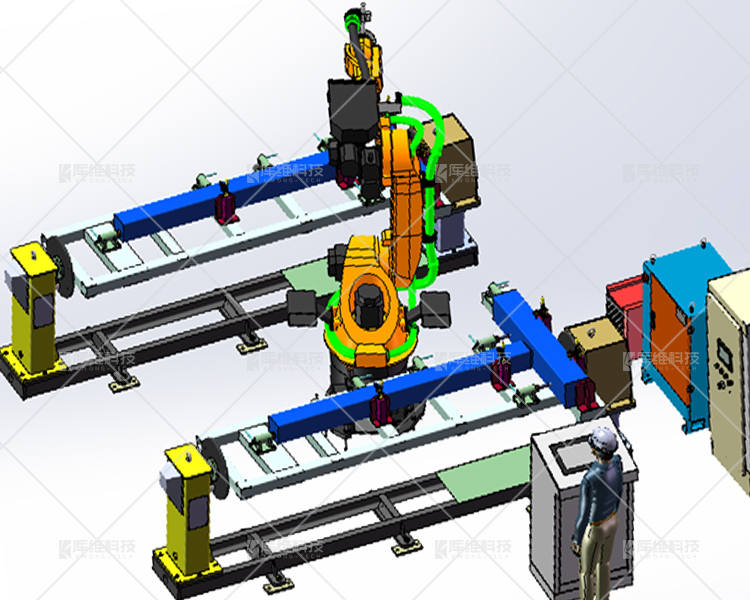
焊接机器人想必都不陌生,除了焊接主体部分(机器人本体,焊接设备等)之外,还需要用到工装夹具,这个作用是什么呢?精准定位,保证焊接精度,提高产品的质量和效率,同时减轻人工的劳动量。那么对于焊接机器人工装夹具设计有什么要求?一起来看看。
1、焊接机器人的工装夹具,不像其他设备那么简单,必须要符合一定的设计要求才能予以应用。如,夹紧时不应破坏焊件的表面质量;在夹紧薄件时,限制夹紧力或者采取压头行程限位、加大压头接触面积、加添铜、铝衬套等措施,做到夹紧可靠,刚性适当。
2、焊接的定位位置和几何形状也不能被焊接机器人的工装夹具影响,要做到夹紧后既不使焊件松动滑移,又不使焊件的拘束度过大而生产较大的应力
3、工装夹具的施力点应位于焊件的支承处或者布置在靠近支承的地方,并且要防止支承反力与夹紧力、支承反力与重力形成力偶。
4、为了便于控制,在同一个夹具上,定位器和夹紧机构的结构形式不宜过多,并且尽量只选用一种动力源。
5、工装夹具自身应动作迅速、操作方便,且操作位置应处在工人容易接近、最易操作的部位。
6、夹具处于夹紧状态时,能自锁;同时还要有足够的装配、焊接空间,所有的定位元件和夹紧机构应与焊道保持适当的距离。
以上就是关于
焊接机器人工装夹具设计要求的介绍,更多资讯干货请关注库维科技,多年专业专注工业自动化集成,丰富工程案例,久经项目考验,致力于为先进制造提供最有价值的解决方案,拨打热线400-1399-168免费领取机器人喷涂,焊割,打磨工作站方案,专业团队为您服务。
相关文章

自动化工业机器人控制设备安装环境说明

自动化川崎工业机器人控制设备搬运、安装和保管时的注意事项
我国自主品牌机器人加快成长 应用范围更深更广

亚马逊宣布收购比利时机器人公司Cloostermans

自动化焊接机器人之点焊机器人的特点

自动化生产线中焊接机器人的调试技巧

自动化焊接机器人运行成本及管理分析

美国机器人初创Dusty Robotics获4500万美元B轮融资,聚焦建筑工地自动化布局
T/CWAN 0042—2020 《药芯焊丝制备工艺及质量评价规范》团体标准宣贯会成功召开