焊接是制造业中不可或缺的工艺,而焊缝跟踪技术则是实现高效、精确焊接自动化的关键。焊缝跟踪技术是一种实现焊接自动化和智能化的关键技术,它通过实时监测和调整焊接过程中的焊枪位置,确保焊接热源始终对准焊缝,从而提升焊接质量、效率,并降低生产成本。
一、焊缝跟踪技术的基本原理
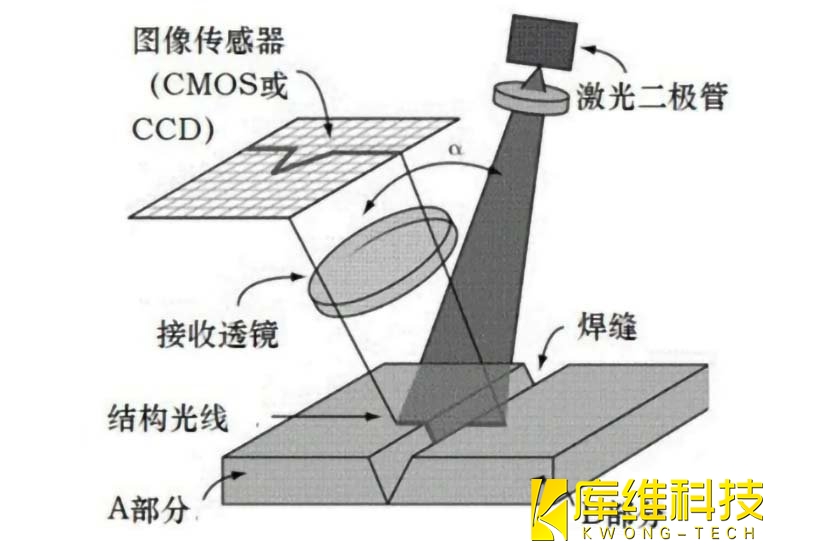
焊缝跟踪技术通常基于传感器(如激光传感器或视觉传感器)来实时采集焊缝的图像信息,然后通过图像处理和分析来识别焊缝的位置和形状。控制器根据这些信息调整执行机构(如焊接机器人的焊枪),实现对焊缝的精确跟踪。其中,激光焊缝跟踪技术利用激光三角形测量法,通过激光器发射线激光照射到工件表面,经过漫反射后,激光轮廓在CCD或CMOS传感器上成像。控制器对采集到的图像进行处理分析,获取焊缝的位置,用于修正焊接轨迹或引导焊接,如图所示。视觉图像法主要基于普通视觉的焊缝跟踪使用光学摄像头或工业相机对焊缝进行拍摄,获取焊缝的图像信息,然后利用图像处理算法对图像进行分析和处理,提取出焊缝的位置和形状信息。
二、焊缝跟踪技术的应用领域
焊缝跟踪技术广泛应用于各种焊接场景中,如钢结构、船舶、汽车、航空航天等领域。具体应用场景包括:
(1)钢结构焊接:钢结构焊接过程中,由于工件尺寸大、形状复杂,手动焊接难度大且效率低下。焊缝跟踪技术可以实现对焊缝的自动识别和跟踪,提高焊接质量和效率。
(2)船舶制造:船舶制造过程中,需要进行大量的焊接作业。焊缝跟踪技术可以实现对船舶焊缝的精确跟踪,提高焊接质量和效率,降低工人劳动强度。
(3)汽车制造:汽车制造过程中,焊缝的质量和精度对汽车的安全性和舒适性有着重要影响。焊缝跟踪技术可以实现对汽车焊缝的精确跟踪,提高焊接质量和效率,降低制造成本。
(4)航空航天:航空航天领域对焊接质量的要求极高,焊缝跟踪技术可以实现对航空航天器焊缝的精确跟踪,确保焊接质量符合高标准要求。
三、焊缝跟踪技术的主要挑战
尽管焊缝跟踪技术取得了进展,但在实际应用中仍面临诸多挑战:
(1)复杂的焊接环境:焊接往往发生在高温、高湿、高尘、狭小空间等复杂环境中,这些环境条件可能对传感器和设备的正常运行产生负面影响,降低焊缝跟踪技术的准确性和稳定性。
(2)焊缝多样性:不同的焊接任务可能涉及到多种类型的焊缝,如角焊缝、对接焊缝、横焊缝等,每种焊缝的形状和特点都不相同,给焊缝跟踪技术带来挑战,需要能够适应各种不同形状的焊缝。
(3)实时性要求:在焊接过程中,实时性至关重要。焊缝跟踪技术需要在焊接过程中实时监测和调整,以确保焊接质量。焊接过程中可能存在的高温和高能量等因素,使得实时性成为一个技术上的挑战。
(4)环境光线干扰:激光传感器对环境光线的敏感性较高,可能受到环境光线的干扰,影响跟踪的准确性。
(5)成本问题:激光焊缝跟踪技术的成本相对较高,可能限制了其在某些领域的应用。
(6)强噪声干扰:焊接过程中存在的金属飞溅、烟尘以及强弧光等常见的强噪声干扰,给激光视觉焊缝跟踪的稳定性和精确性带来极大挑战。
(7)数据标注成本:训练深度学习模型需要大量的标注数据,数据标注成本较高,这对于焊缝跟踪技术的应用和优化也是一个挑战。
焊缝跟踪技术的研究和应用已经取得了一定的进展,但仍然面临着许多挑战。如何在实际生产中实现焊缝跟踪技术的稳定运行、准确检测和及时反馈仍然需要进一步探索和研究。未来,随着新材料、新工艺、新应用的不断出现,焊缝跟踪技术也将不断更新和发展,为焊接领域的发展做出更大的贡献。