控制柜 (CCU)包含两块电路板 (CIB 控制柜接口板和 PMB 电源管理板),是机器人控制系统所有组件的配电装置和通讯接口. 所有数据通过内部通讯传输给控制系统,并在那里继续处理. 当电源断电时,
控制系统部件接受蓄电池供电,直至位置数据备份完成以及控制系统关闭. 通过负载测试检查蓄电池的充电状态和质量.
固定 CCU如下图:
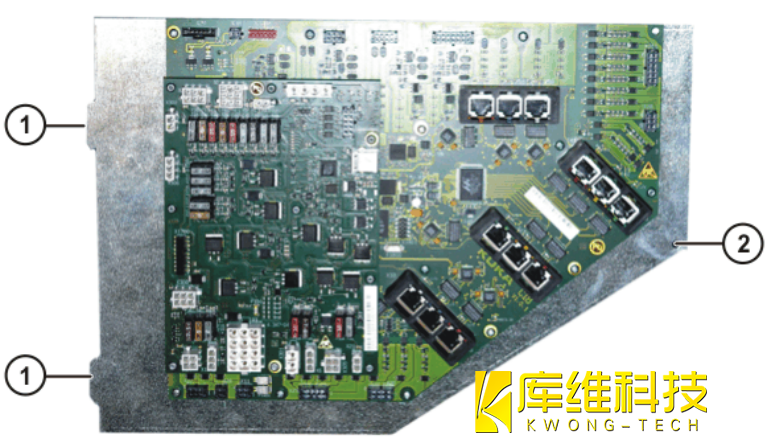
1 连接板插接片
2 固定螺丝
工业机器人KRC4控制柜的功能:
1 机器人控制系统部件的通讯接口
2 安全输出端和输入端
a 控制主接触器 1 和 2
b 校准定位
c 插入的库卡 smartPAD
3 8 个适用于客户应用程序的测量输入端 (节拍:125μsec)7 监控机器人控制系统中的风扇
a 外部风扇
4 温度值采集:
a 压器的热效自动开关
b 冷却器的信号触点
c 主开关的信号触点
d 镇流电阻温度传感器
e 柜内温度传感器
5 下列部件通过库卡控制器总线与控制系统电脑相连接:
a KUKA Power Pack / KUKA Servo Packs
b 分解器数字转换器
6 通过库卡系统总线,下列组件可与控制系统电脑相连接:
a 库卡 smartPAD (Operator Panel Interface)
b 安全接口板
7 诊断 LED
8 数据存储器的接口
KRC4控制柜 (CCU ) 的电源:
缓冲式供电
1 KPP
2 KSP
3 库卡 smartPAD
4 控制系统多核电脑
5 控制系统操作面板 (CSP)
6 分解器数字转换器 (RDC)
非缓冲式供电
1 电机制动装置
2 外部风扇
3 客户接口
4 快速测量输入端
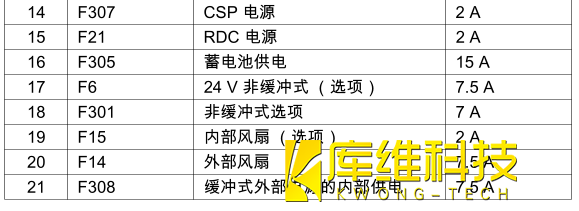
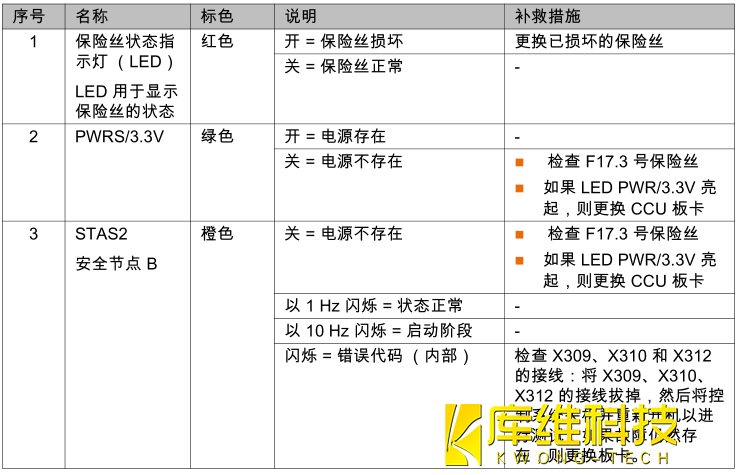
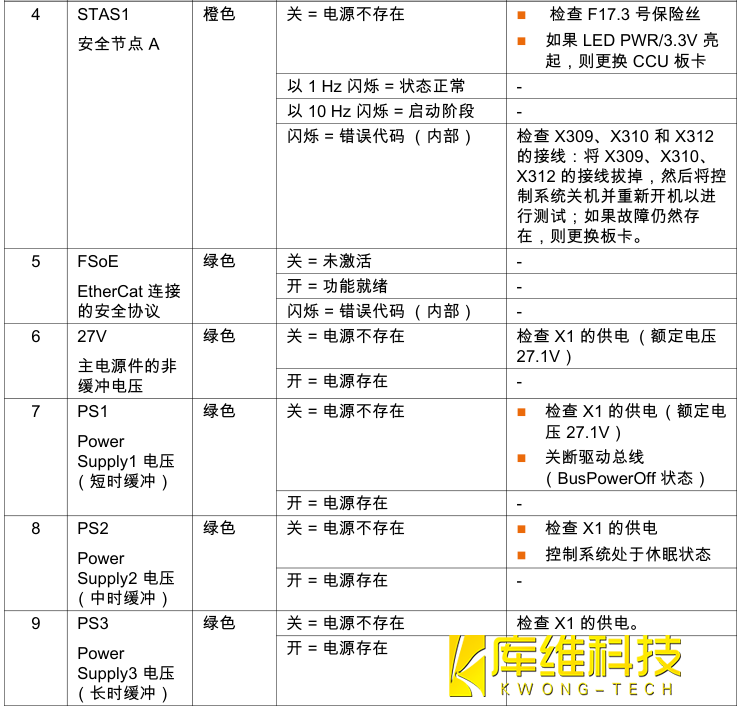
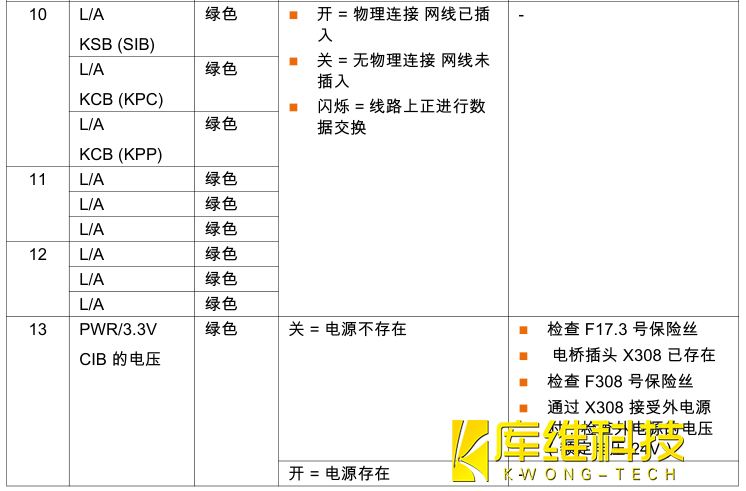
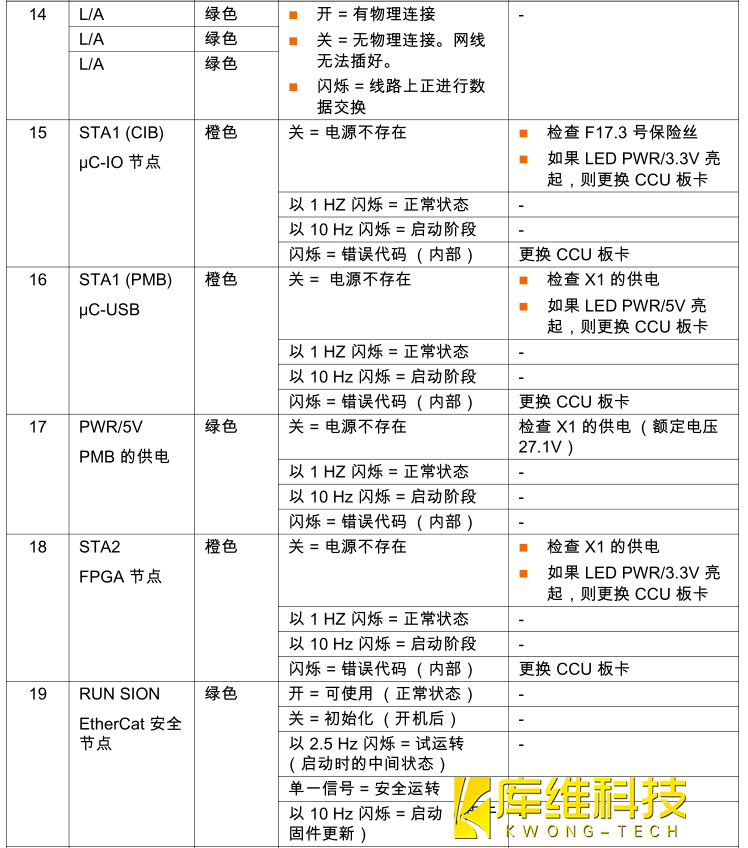
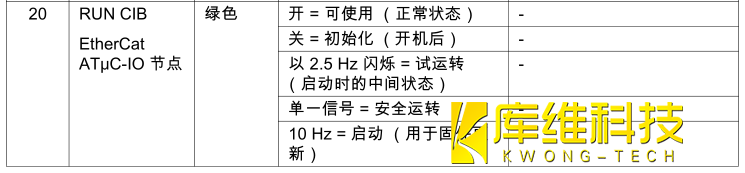
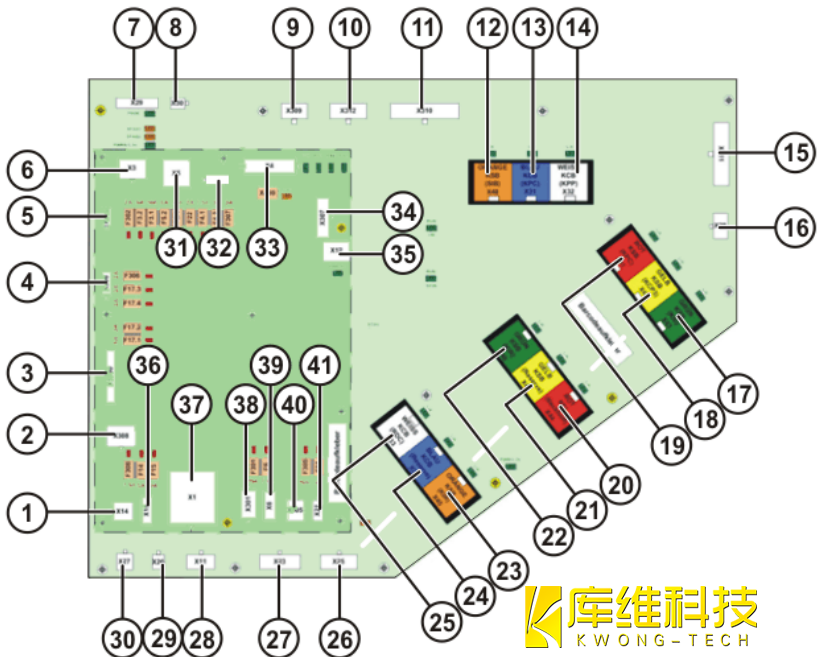
机器人KRC4 CCU 保险丝和LED 指示灯
注意:故障的保险装置以保险装置旁一个红色 LED 示出. 故障的保险装置在排除故障原因后仅允许用操作手册或设备组件上所印的值来替换.
机器人KRC4控制柜的更换步骤 :
1. 关闭控制系统并采取确安措施防止未经授权的重启2. 将数据线插头解锁拔出控制柜 (CCU ) 上的所有接线解锁数据线插头如下图

1 插头已解锁
2 插头已锁闭
3 插头已插入并锁闭
注意:如果数据线插头在没有解锁时被拔下,则插头会受损. 在拔下前解锁插头.
3. 取下固定板上的螺栓,将固定板连同 CCU 从连接板开口处拉出.
4. 检查新 CCU 是否有
机械损伤. 将固定板连同 CCU 插入连接板开口,然后拧紧.
固定 CCU如下图:
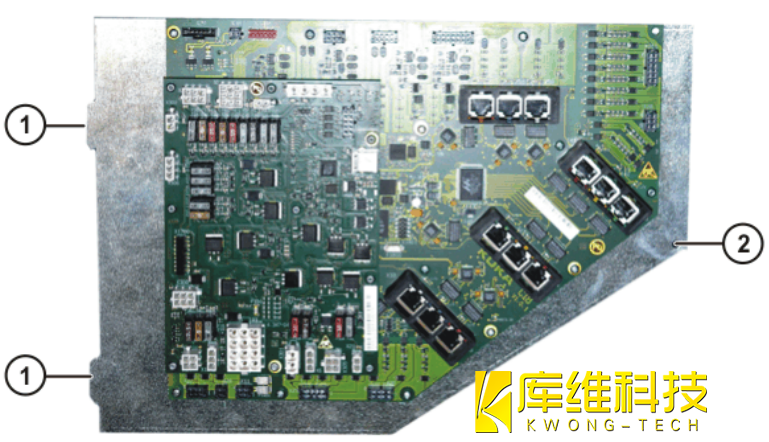
1 连接板插接片
2 固定螺丝
5. 按照插头和线缆说明将所有接口插入. 将数据线插头锁紧.
6. 实施功能测试
5. 按照插头和线缆说明将所有接口插入. 将数据线插头锁紧.
6. 实施功能测试