工业机器KRC4 KPP :库卡配电箱 (KPP) 是驱动电源,可从三相电网中生成整流中间回路电压. 利用该中间回路电压可给内置驱动调节器和外置驱动装置供电.有 4 种规格相同的设备变型.KPP 上设有显示工作状态的 LED 指示灯.
工业机器KRC4 KPP 的变型:
1 KPP 不带轴伺服系统 (KPP 600-20)
2 KPP 带单轴伺服系统 (KPP 600-20-1x40)
输出端峰值电流 1x40 A
3 KPP 带单轴伺服系统 (KPP 600-20-1x64)
输出端峰值电流 1x64 A
4 KPP 带双轴伺服系统 (KPP 600-20-1x40)
输出端峰值电流 2x40 A
工业机器KRC4控制电箱的功能
1 KPP 复合运行中的中央交流电源接口
2 馈电压为 400 V 时的设备功率: 14 kW
3 额定电流: 25 A DC
4 接通和关断电源电压
5 用直流中间回路为多个轴伺服系统供电
6 带外部镇流电阻接口的集成制动斩波器
7 镇流电阻的过载监控
8 通过短路制动使同步伺服电机停止运转
工业机器KRC4 KPP 原理电路图如下:

带双轴伺服系统的 KPP 连接如下图:


LED 指示灯诊断
工业机器KRC4 KPP 的 LED 显示由以下 LED 组构成:
1 供电
2 KPP 设备状态
3 轴调节器
工业机器KRC4 KPP、KSP 的 LED 指示灯如下图

1 供电 LED 组
2 KPP 设备状态 LED 组
3 驱动总线状态 LED 组
4 轴调节器 LED 组
5 轴调节器 LED 组
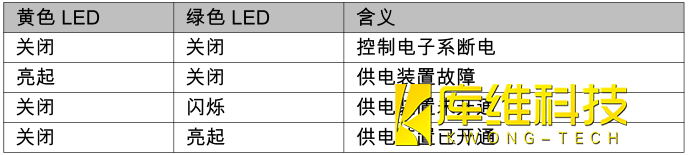
供电 LED 组:
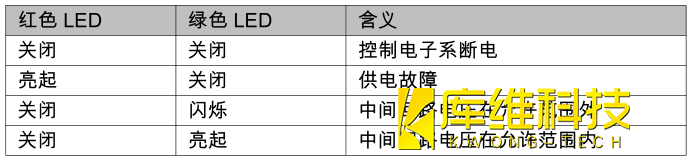
KPP 设备状态 LED 组:
轴调节器 LED 组:

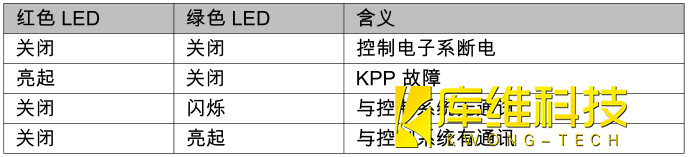
驱动总线状态 LED 组:
其他错误:

工业机器人更换零件时的安全:
1 机器人控制系统必须保持关机状态,并具有可防意外重启的保护措施.
注意:如果要在
机器人控制系统停止运行后立即进行拆卸,则必须考虑到散热器表面温度可能会导致烫伤. 请戴防护手套.
2 电源线已断电.
警告:即使在主开关关断时,白色导线也带有电源电压! 在接触导线时此电源电压可造成致命伤害.
3 按 工业机器人 ESD 准则开展工作.
4 等待 5 分钟,直至中间回路完全放电.
警告:若将机器人控制系统关断,下列部件仍可能在长达 5 分钟的时间内带电 (50 … 780 V):
1 KPP
2 KSP
3 中间回路连接电缆
此电压可能导致生命危险.
KPP/KSP 的更换步骤:
1. 将控制系统关机并采取措施防止其被意外重启
2. 将数据线插头 X20 和 X21 解锁, 解除 KPP 上的所有连接.
3. 松开内六角螺丝 (1)
4. 将 KPP 略微向上抬起,顶部向前倾斜,将其从壳体支撑角铁 (3)中向上取出
固定 KPP如下图:
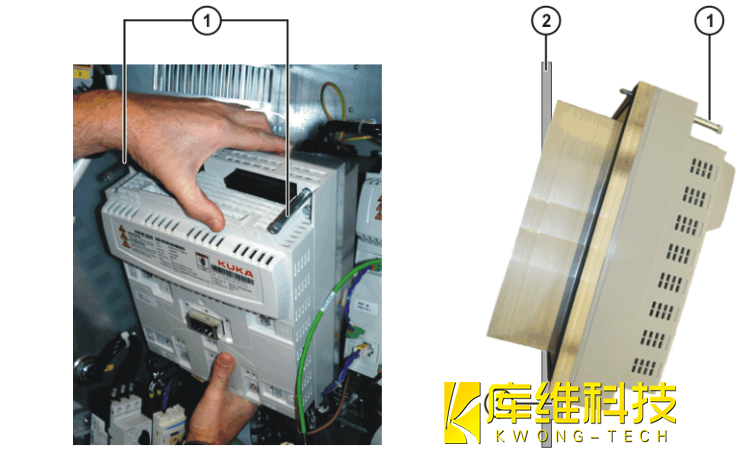
1 内六角螺栓 2 柜背板 3 壳体支撑角铁
注意:KPP 的重量约为 10 kg. 在 KPP 的拆装工作中存在挤伤危险!请戴防护手套5. 将新的 KPP 插进壳体支撑角铁 (3)里,然后将其上部挂入角铁并拧紧(拧紧扭矩 4 Nm)6. 按照插头和线缆说明将所有接口插入. 将插头 X20 和 X21 锁紧.
7. 如果因设备更换而进行了系统更改,则必须用 WorkVisual 配置
工业机器人的系统结构.
8. 实施功能测试








