机器人RDC 是一种可将分解器模拟数值转换成数码数值的电路板。该电路板嵌装于一个 RDC 盒内,并整体固定在机器人支脚或者转台上,具体固定位置视机器人类型而定。
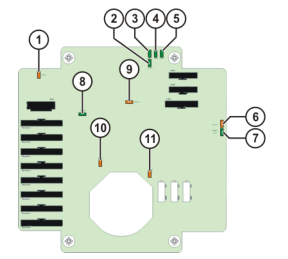
机器人上的分解器数字转换盒如下图:

1 产生所有需要的工作电压
2 借助安全技术分解器 (SIL2)采集八个电机的位置数据
3 采集八个电机的工作温度
4 采集 RDC 的温度
5 与机器人控制器进行通讯
6 监控分解器的线路是否中断
7 评估 EMD ( EMD=E Electronic Mastering D Device,即电子控制装置)
8 将数据保存于存储卡 ( EDS=E Electronic D Data S Storage,电子数据存储器)
利用两个 FPGA = (F Field P Programmable G Gate A Array,即现场可编程门阵列)
可进行安全的双通道式分解器评估和分解器
数据分析处理。 两个 FPGA 的任务相同,并对检测结果进行比对。 不过当两个 FPGA 一致时,将维持与控制系统之间的通讯。 如果出现故障,EtherCAT 连接将会中断。
FPGA 是一种属于数码技术领域的集成电路 (IC),其里面的逻辑电路可接收编程设置。
工业机器人 KRC4 RDC 接口
工业机器人 KRC4 RDC 接口概览如下图


RDC 的 LED 指示灯显示如下图

1 机器人控制系统必须保持关机状态,并采取保护措施以防意外重启。
2控制系统已关闭。
3 电源线必须已断电。
4 按 ESD 准则进行作业。控制系统电脑安全提示
5 机器人控制系统必须保持关机状态,并采取保护措施以防意外重启。
6 控制系统已关闭。
7 电源线必须已断电。
8 按 ESD 准则进行作业。
工业机器人 KRC4 RDC 的更换方法:
1. 将控制系统关机并采取措施防止其被无意重启
2. 拧松并取出 RDC (分解器数字转换器)盒盖上的螺丝
3. 将所有导线小心地拔下,并弯到一边
4. 将 EDS 接头小心地拔出
注意:EDS 存储器不拆下,在 RDC 更换时留在 RDC-Box 中。
5. 取下 RDC 板卡上的固定螺丝 (1)
1 )固紧 RDC 板卡: M6x10
拧紧扭矩: 2.0 Nm
2) 固紧 EDS: 塑料螺母 M2.5
拧紧扭矩: 0.1 Ncm
6. 小心将 RDC 板卡从 RDC 盒中取出,注意不要扭曲
7. 装入新的 RDC 板卡并拧紧
8. 插好所有连接线
9. 将 EDS 接口插上
10. 盖好 RDC 盒盖并拧紧螺丝
11. 实施功能测试