什么是工业机器人库卡KRC4分解器及其工作原理
发布日期:2022-07-11 11:56 浏览量:
库卡机器人KRC4分解器用于分析处理轴的当前位置,是一种旋转式行程测量系统。
分解器如下图:
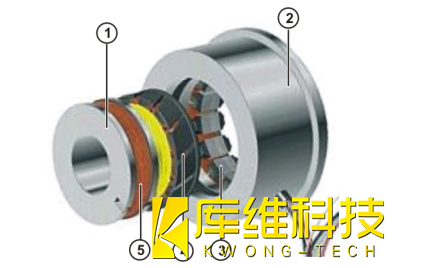

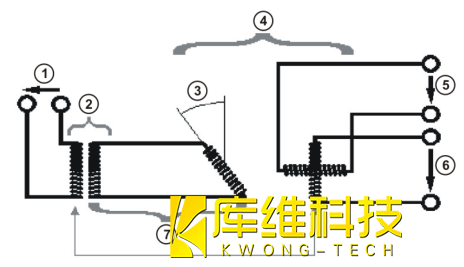
机器人分解器是按感应原理来运作的。
转子 (3)通过旋转式变压器 (2)接受一个电压装置 (1)的供电 (频率 =
8kHz)。 在定子线圈 (正弦线圈和余弦线圈; 5.6)内,通过感应引起与转子
位置成比例的电压。
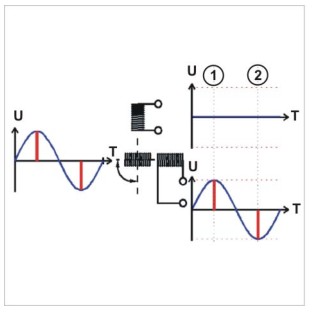
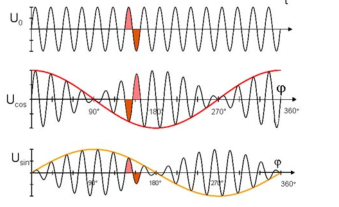
库卡机器人分解器原理图如下:

电压随着转子的旋转而变化。
感应引起的电压在两个测量点 (1,2)接受探测和评估。
库卡机器人
分解器感应度 - 0 度如下图:
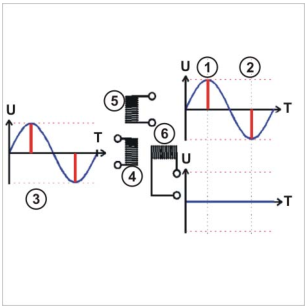
旋转 30 度角时的分解器感应
机器人分解器感应度 - 30 度如下图:
旋转 90 度角时的分解器感应
旋转 135 度角时的分解器感应
库卡机器人分解器感应度 - 135 度如下图:
旋转 180 度角时的分解器感应
库卡机器人分解器感应度 - 180 度如下图:
在库卡采用的分解器中,各设有 3 个正弦线圈和余弦线圈。
这样,电机每一圈机械式旋转就等于分解器电旋转 3x120 度角
库卡机器人分解器转数如下图:
电旋转一圈等于 65536 个增量 (16 比特)。
库卡机器人
分解器每一圈机械式旋转则等于 196608 个增量 (3*65536 增量)。
相关文章

常见的工业机器人主要有哪几个种类?

机器人厂家如何助力企业提升竞争力与盈利能力

探秘优秀工业机器人制造商选择秘籍:必备指南与实用建议

掌握最新自动化生产线技术,轻松提高生产效能!

切割机器人的五大应用领域及精选案例解读

机械臂+LED显示屏舞台工程案例分析

工业机器人自动化:推动生产领域革新

自动化生产线工业机器人线束连接注意事项

自动化工业机器人控制设备安装环境说明