库卡机器人KRC4分解器位置的功能原理
发布日期:2022-07-11 11:33 浏览量:
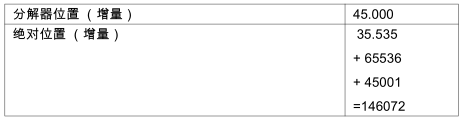
工业机器人分解器以增量的形式提供位置数据 (16 Bit)。
这些位置数据在 RDC 内乘上一个内部演算系数,并换算成电机角度度数。
在 EDS 里,可保存每条轴的绝对位置值 (64 Bit)。
从该时间点开始,只能继续利用电机角度值来计算。
在 C:\KRC\Roboter\RDC 之下的文件 [Ser.Nr.].cal 里,存有校准位置 (单位:度数)。
不过该文件只在以下条件下才能保存到硬盘:
1 在 HMI 的菜单 【投入运行】 -> 【机器人数据】之下按住了 【保存 RDC数据】键
2 已经成功建立一个档案

在校准位置并非所有轴都已设为 0° 或 90°,而是准确数据已保存在机器数据里 ($mames)
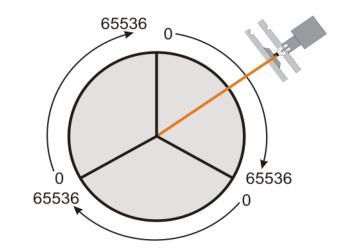
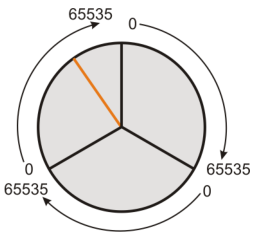
电机不能继续旋转
继续旋转时的分解器位置如下图:
机器人位置在极短时间间隔内、工业机器人停止运行时或工业机器人控制系统关机时被持续保存。
注意:在控制系统起动时,最新提供的库卡机器人分解器当前位置值将与已存的库卡机器人分解器位置值相比较,其中增量值为 1000:
1如果两个数值相等,则将绝对位置应用到增量里,机器人也就准备就绪可
以运行。
2 如果两个数值存在偏差,则必须重新校准
工业机器人。HMI 里将显示与此相关的一条讯息
相关文章