什么是工业机器人库卡KRC4安全接口板 (SIB)及其拆除操作步骤
发布日期:2022-07-14 10:25 浏览量:
机器人安全接口板 (SIB) 是客户安全接口的组成部分,且与
库卡机器人系统总线 (KSB)连接。
库卡机器人SIB 及固定板如下图

借助 SIB 接口板可使
机器人控制系统集成到一个传统铺线方式的设备里。
SIB 接口板可从 smartPad 通过客户接口 X11 提供内部安全信号,例如发出紧急停止信号。
工业机器人库卡KRC4 安全接口板 (SIB)拆除操作步骤:
1. 将控制系统关机并采取措施防止其被无意重启
2. 将数据线插头解锁 拔出 SIB 上的所有连接线
解锁数据线插头如下图:
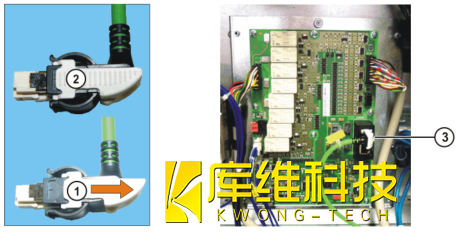
1 插头已解锁
2 插头已锁闭
3 插头已插入并锁闭
3. 取下固定板上的螺栓 (1),并将固定板连同 SIB 从连接板开口处拉出
库卡机器人
SIB 及固定板如下:
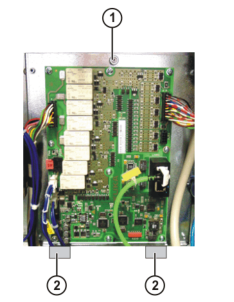
1 固定螺丝
2 连接板插接片
4. 检查新 SIB 是否存在机械损伤将固定板及 SIB 板插入连接板开口处,然后拧紧
5. 按照插头和线缆说明将所有接口插入。将数据线插头锁紧。
注意:如果因更换 SIB 而进行了系统更改,则必须用 WorkVisual 配置
工业机器人的系统结构
相关文章

常见的工业机器人主要有哪几个种类?

机器人厂家如何助力企业提升竞争力与盈利能力

探秘优秀工业机器人制造商选择秘籍:必备指南与实用建议

掌握最新自动化生产线技术,轻松提高生产效能!

切割机器人的五大应用领域及精选案例解读

机械臂+LED显示屏舞台工程案例分析

工业机器人自动化:推动生产领域革新

自动化生产线工业机器人线束连接注意事项

自动化工业机器人控制设备安装环境说明