☎ 400-1399-168
为先进制造提供最有价值的解决方案
为先进制造提供最有价值的解决方案

通过在插头 X1 至 X8 上测量线圈的电阻值,可检测库卡机器人分解器的状态。 1. 将控制系统关机并采取措施防止其被意外重启 2. 将 机器人 分解器数字转换...
工业机器人 分解器以增量的形式提供位置数据 (16 Bit)。 这些位置数据在 RDC 内乘上一个内部演算系数,并换算成电机角度度数。 在 EDS 里,可保存每条...

库卡机器人 KRC4 EMD : 库卡机器人KRC4电子控制装置 (EMD)用于库卡机器人的校准。 1 EMD 属于一个 EtherCAT 总线用户。 2 EMD 与旧式库卡机器人 不兼容,由于...

库卡机器人 KRC4 RDC 的操作步骤: 1. 将库卡机器人控制系统关机并采取措施防止其被意外重启 2. 将所有插头从 RDC 拔除。 3. 在更换 库卡机器人 KRC4 EDS 之前...

KUKA机器人 KRC4 电子数据存储器(EDS): 机器人的电子数据存储器用于保存专业数据。 KR C4 内设有两个电子数据存储器: 1一个与机器人分解器数字转换器连...

机器人 RDC 是一种可将分解器模拟数值转换成数码数值的电路板。该电路板嵌装于一个 RDC 盒内,并整体固定在机器人支脚或者转台上,具体固定位置视机器...
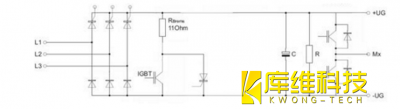
工业机器 KRC4 KPP :库卡配电箱 (KPP) 是驱动电源,可从三相电网中生成整流中间回路电压. 利用该中间回路电压可给内置驱动调节器和外置驱动装置供电.有 4...
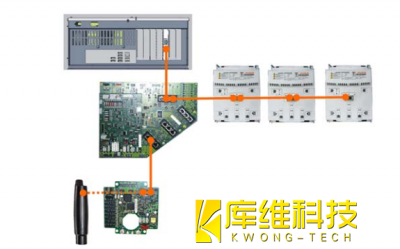
工业机器人 KRC4 KCB 总线结构如下图 工业机器人KRC4 KCB 主要数据 1 基于 EtherCat 的驱动总线 2 循环时间 125 微秒 3 FSOE (F Fail S Safe O Over E EtherCat) 下列设备属于...