☎ 400-1399-168
为先进制造提供最有价值的解决方案
为先进制造提供最有价值的解决方案

通常可采用两种不同技术来保证安全: 1 PROFIsafe: 安全总线系统 2 EtherCAT: SIB 接口板 - X11 /X13 在投入运行时必须对机器人安全进行配置。 其中有两种执行...

投入运行模式 利用 smartHMI 操作界面里的一个菜单项,可将 工业机器人 设定为投入运行模式。 在该模式下,机械手可在外围安全装置缺位的情况下以 T1 方...

现代化机械设备种类多,使用率高,而且功能也广泛,像 焊接机器人 在工业化进程中使用的也较为多样,今天给您介绍关于此类机器人设备相关的内容,...

库卡机器人 控制柜的镇流电阻: 机器人的镇流电阻用于制动过程中产生的中间回路电压的放电。 制动时的放电形式: n 制动斩波 - 中间回路电压瞬间放电...
对于OLP中Speed和Zone值的设定: Zone值一般情况下,要根据 机器人 运动速度和对运动的精度要求来确定,即Zone与Speed值是相关的。 1. 通常在开阔而又无高精...

什么是 焊接机器人 的焊缝跟踪器 焊缝跟踪作为一门综合性应用技术,具有多学科交叉融合的特性,包括电子技术、计算机、 焊接 、结构、材料、流体、...
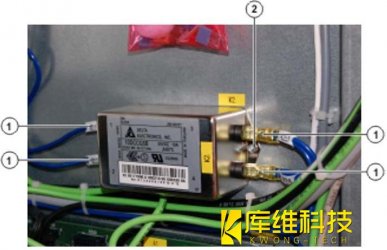
工业机器人 制动过滤器 工业机器人制动过滤器用于过滤制动器松开时产生的电压峰值。制动过滤器嵌装在控制柜的右侧。 工业机器人 KRC4 制动过滤器更换...

随着制造业的转型升级,以及电子制造产业的发展,协作 机器人 成为热门话题,而对于初涉足机器人领域的用户来说,或许对协作机器人与传统工业机器...