☎ 400-1399-168
为先进制造提供最有价值的解决方案
为先进制造提供最有价值的解决方案

前提条件 已存在一个完整的映射。 该映射必须直接存放在 U 盘的 映射 目录之下。 无需操作的方法 无需借助操作界面而完成安装。 Controller.ini 1 不用操作...
准备工作 为对所有设置项的建立档案,无论是 Windows 还是 KRC,都建议创建完整的映射。 映射要么可存放在 机器人 控制系统的一个本机驱动器,或可直接...

库卡机器人 KRC 4 初次安装软件操作方法 :既可利用操作界面也可利用静默模式来进行安装。 Controller.ini 1 利用库卡机器人 操作界面: 模式和持久性不是至...

焊接方法: 五步焊接法: 1)准备施焊 左手拿 焊丝 ,右手握烙铁,进入备焊状态。要求烙铁头保持干净,无焊渣等氧化物,并在烙铁头上镀一层锡。焊接...

在 工业机器人 KR C4 里,只还可通过 【KR C 系统还原】来实现软件安装。 步骤如下: 1 安装软件映射 2 安装所需的工艺数据包 3 执行 WorkVisual 配置或档案...

如何配置 自动化 库卡机器人KRC 系统 配置途径 机器人控制系统 (KRC)的硬盘映射既可建立到一个网络驱动器里,也可通过一个网络驱动器来恢复。 文件夹...
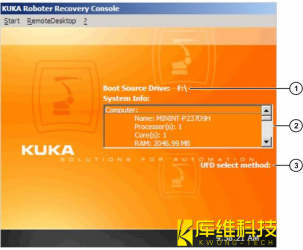
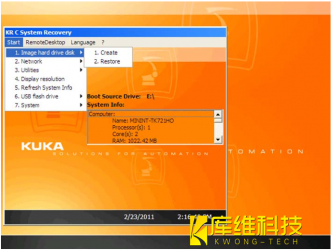
库卡 工业机器人 KRC 系统还原 是基于 WinPE 且拥有下列功能的档案软件: 1 创建或恢复机器人控制系统的硬盘存储器映射 2 在库卡 USB 启动盘、外置 USB 硬盘...
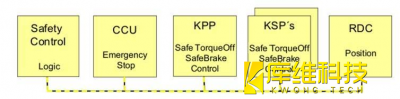
所有核心组件都拥有集成式安全功能 安全组件之间通过 EtherCAT 和 FSoE (Fail Safe over EtherCAT)相互通讯示例: 1 驱动系统配设 STO (Safe Torque Off) 2 配设 机器...