☎ 400-1399-168
为先进制造提供最有价值的解决方案
为先进制造提供最有价值的解决方案

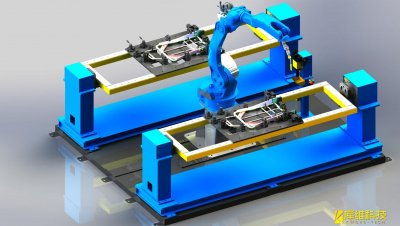
焊接机器人 如何保障工件质量 作为示教一再现式焊接机器人,要求工件的装配质量和精度必须有较好的一致性。 应用焊接机器人应严格控制零件的制备质...
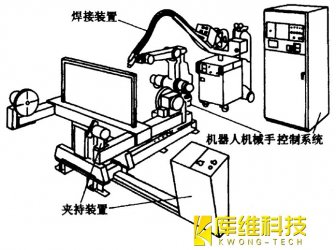
焊接机器人 焊接缺陷分析 焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊...
焊接机器人 是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(ISO)工业机器人属于标准焊接机器人的定义, 工业机器人 是一种多用途...

1.如果项目里已发生变化,WorkVisual 必须将变化情况发送给控制系统 2. 库卡将该做法叫做 Deployen (调度) 3. 在将一个项目传输到机器人控制系统时,总是先...
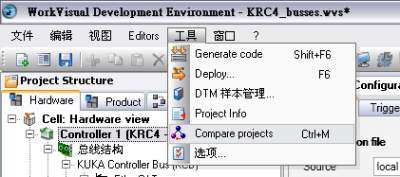
1. 在 WorkVisual 中按序选择菜单项: 工具 比较项目。 窗口 【 比较项目】打开。 2. 选择需与当前 WorkVisual 项目作比较的项目,例如实际机器人控制系统上的...
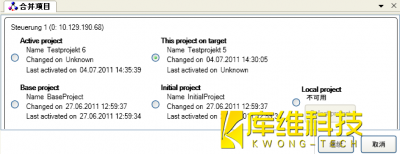
自动化生产线中库卡 工业机器人 项目比较的原理 库卡工业机器人项目比较的原理前提条件 利用 【比较】功能可显示已存项目与 KR C4 里现有项目之间的差...

在每个 具有网络连接的 机器人 控制系统中,都可选出一个项目并传送给WorkVisual 。 即使该电脑里尚没有该项目时也能实现。 该项目保存在目录:Eigene D...
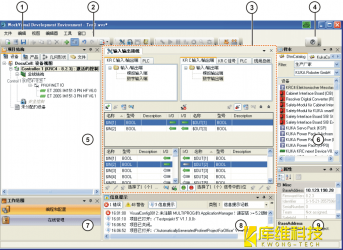
在默认状态下,并非所有单元都显示在操作界面上,而是可根据需要显示或隐藏。 除了此处图示的窗口和编辑器之外,还有更多可供选用。 这些可通过菜...