☎ 400-1399-168
为先进制造提供最有价值的解决方案
为先进制造提供最有价值的解决方案
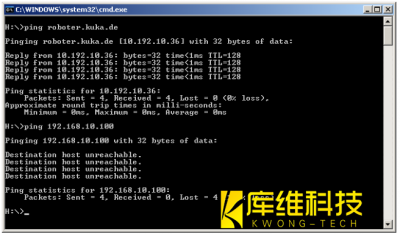
通过发送响应请求,【 Ping 】指令可检查设备与 IP 层面另一 TCP/IP 电脑的连通性。 相应的响应接收情况将与时间信息一起显示出来。 【 Ping 】是处理连通...
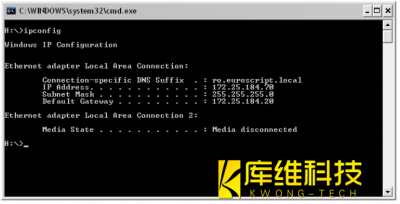
工业机器人 库卡机器人KRC4控制系统IPconfig 的工作原理: ipconfig 可显示 TCP/IP 网络的所有最新配置值,并可更新 DHCP 设置 (动态主机配置协议)和 DNS 设置...
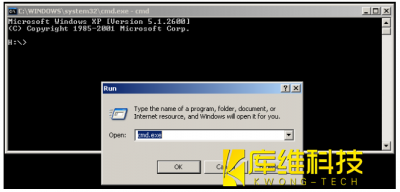
利用 CMD.exe 指令 (在 Windows 环境按序执行: 开始 - 执行)可打开输入窗口。 窗口里可见一个命令行解释程序 (也叫 Terminal 或 Shell )的输入栏,里面可输...

TCP/IP 与 工业机器人 KR C4 网络的互联关系 在 机器人 KR C4 控制系统里,同样须对 IP 地址进行分配。 当客户希望与 机器人 KR C4 控制系统通讯时,可通过 K...
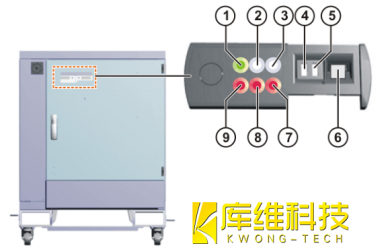
什么是 库卡机器人 KRC4 CSP ? 库卡机器人KRC4 控制系统操作面板 (CSP ) 是各种操作状态的显示单元,并且拥有下列接口: 1 USB1 2 USB2 3 KLI (库卡线路接口),...

库卡机器 人KRC4 KLI 总线结构如下图: 库卡 机器人 KLI 主要数据 1 基于以太网的客户接口 X66 和 X67 2 与设备及上级机构耦联 (客户网络,服务器) 3 基于以...

库卡机器人 KRC4 KEB 总线结构如下图: 库卡机器人KRC4 KEB 主要数据 1 机器人 控制柜 (CCU ) 里的 EtherCat 主机 2 循环时间 1 毫秒 3 性能优异的现场总线,可作为...

机器人安全接口板 (SIB) 是客户安全接口的组成部分,且与 库卡机器人 系统总线 (KSB)连接。 库卡机器人SIB 及固定板如下图 借助 SIB 接口板可使 机器人...